News
Virtual Environment Implementation Progress
One of the key challenges in the development of the LEMURS project is the availability of an accurate and efficient simulation environment. Such a simulator

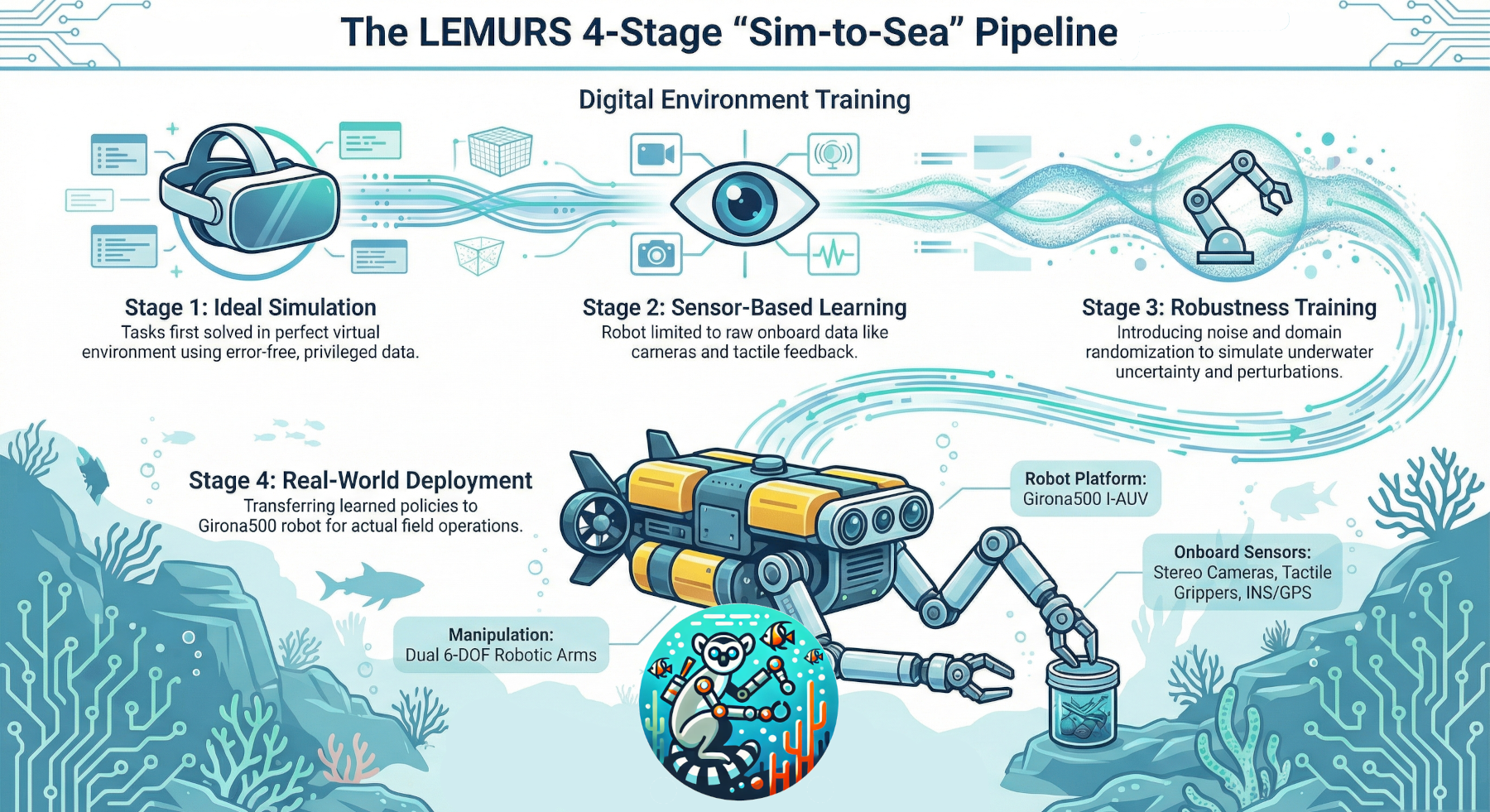
One of the key challenges in the development of the LEMURS project is the availability of an accurate and efficient simulation environment. Such a simulator
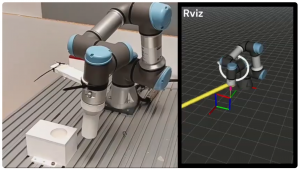
Within the framework of the LEMURS project, Task T2.2 – ML-based Algorithm Evaluation for Manipulation has been successfully carried out through two Master’s theses conducted

Honored to have been a speaker at RobSummit (2nd Edition) at the University of Porto, invited by our colleagues at INESC TEC. Following insightful sessions

UrbanAcres, LLC

H&H Legal Partners
SavvyMarket