Virtual Environment Implementation Progress
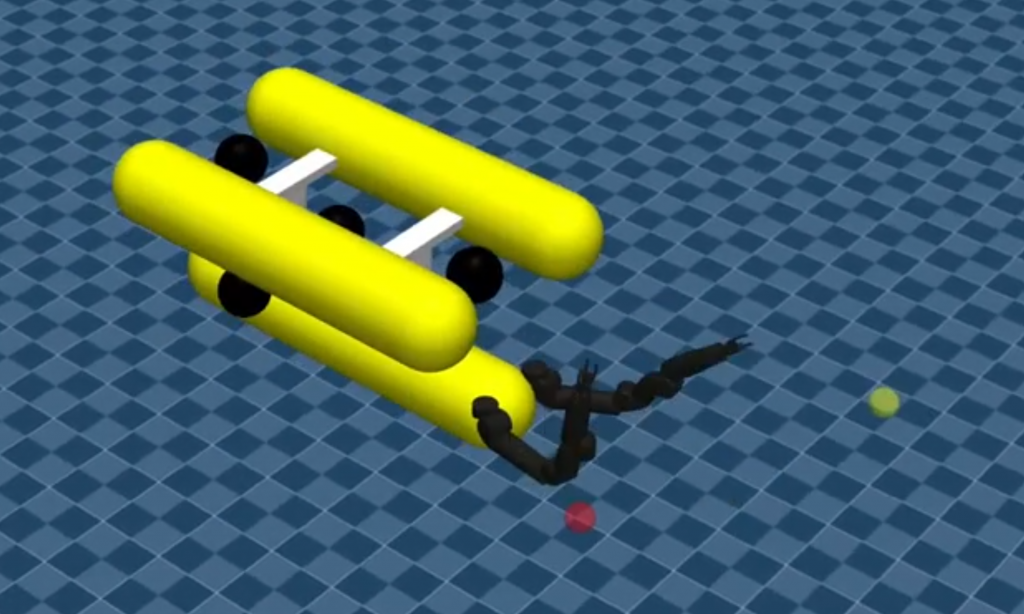
One of the key challenges in the development of the LEMURS project is the availability of an accurate and efficient simulation environment. Such a simulator is essential to enable learning and validation of robotic manipulation tasks in a virtual setting before transferring them to real robotic platforms, reducing risks, costs, and development time. Task T3.3 […]
ML-Based Algorithm Evaluation for Manipulation
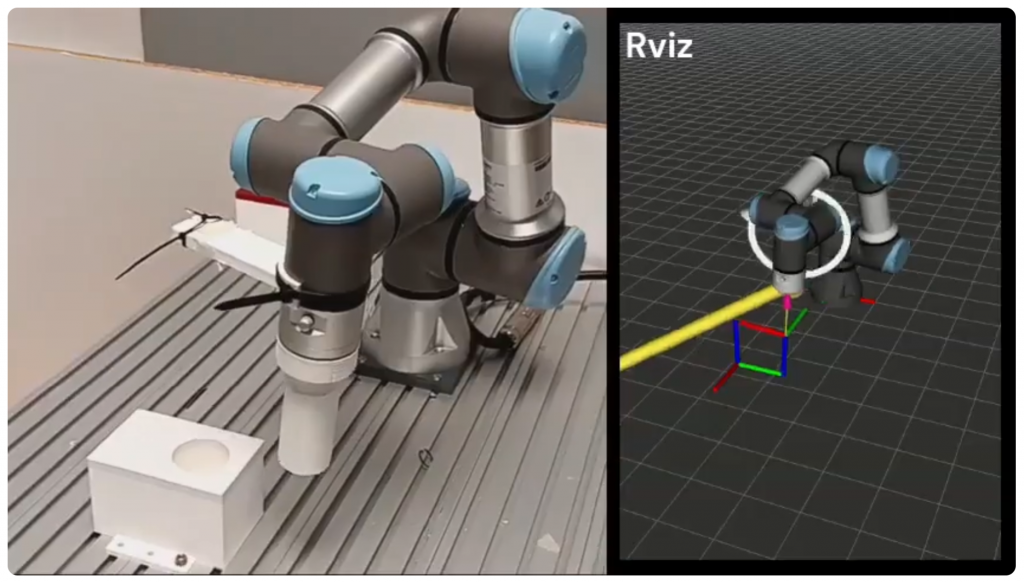
Within the framework of the LEMURS project, Task T2.2 – ML-based Algorithm Evaluation for Manipulation has been successfully carried out through two Master’s theses conducted using an industrial manipulator (UR3e). This task aims to evaluate the performance of Deep Reinforcement Learning (DRL) and Imitation Learning (IL) algorithms for robotic manipulation, as well as to investigate […]
RobSummit 2026 Porto

Honored to have been a speaker at RobSummit (2nd Edition) at the University of Porto, invited by our colleagues at INESC TEC. Following insightful sessions from Luís Paulo Reis, Nuno Lau, and Michele Olivieri, I shared our vision for the future of AI in underwater robotics, highlighting the LEMURS project. At VICOROB, our mission is […]